反坦克武器装备机电系统虚拟仿真综合实验(国家虚拟仿真金课)
实验目的
1)了解机电一体化技术在反坦克武器系统目标捕获、跟踪、瞄准与打击等工程实践环节中的应用,熟悉有关基本概念与技术特性。
2)掌握有关典型机械传动装置、伺服元件、检测与控制器件的原理构造、技术特性及使用要求。
3)掌握典型装备机电系统的工作原理与结构组成,以及有关技术性能参数与要求。
4)理解跟踪与随动伺服控制系统的实现方法,了解其核心关键技术。
5)熟悉反坦克武器装备机电系统工作原理及结构组成,了解其主要性能参数及其评价方法,熟悉其操作与使用。
实验原理
反坦克武器装备机电系统虚拟仿真综合实验主要包括网络单元原理实验及系统模拟综合实验两部分。网络单元原理实验以反坦克武器装备为主线,开展有关典型机械传动装置、伺服元件、检测与控制器件等原理性基础实验,具有较好的通用性,实验形式以虚为主,便于网络平台推广学习。系统模拟综合实验是以实装应用技术为背景,构建反坦克武器装备模拟实验平台,开展有关反坦克作战模拟综合实验,实验采用虚实结合的形式,注重实装技术的模拟与训练。
反坦克武器装备机电系统虚拟仿真综合实验通过采用声、光、电、投影等多种多媒体手段,虚拟仿真一个反坦克武器系统的作战动态场景(如图1、2所示),模拟反坦克武器系统目标搜索、目标跟踪、武器系统随动、激光指向、手柄操控、目标打击和打击效果评判等一整套虚拟作战过程。
实验系统主要由以下四部分组成:声、光、电、投影与演示平台、战场环境模拟与评估平台、车载武器系统模拟操控平台、光电搜跟与武器随动平台。其中,车载武器系统模拟操控平台包含:人机交互的显控单元、车载武器操控手柄等;光电搜跟与武器随动平台包含: 光电搜跟单元、武器随动单元、模拟车辆移动单元等。
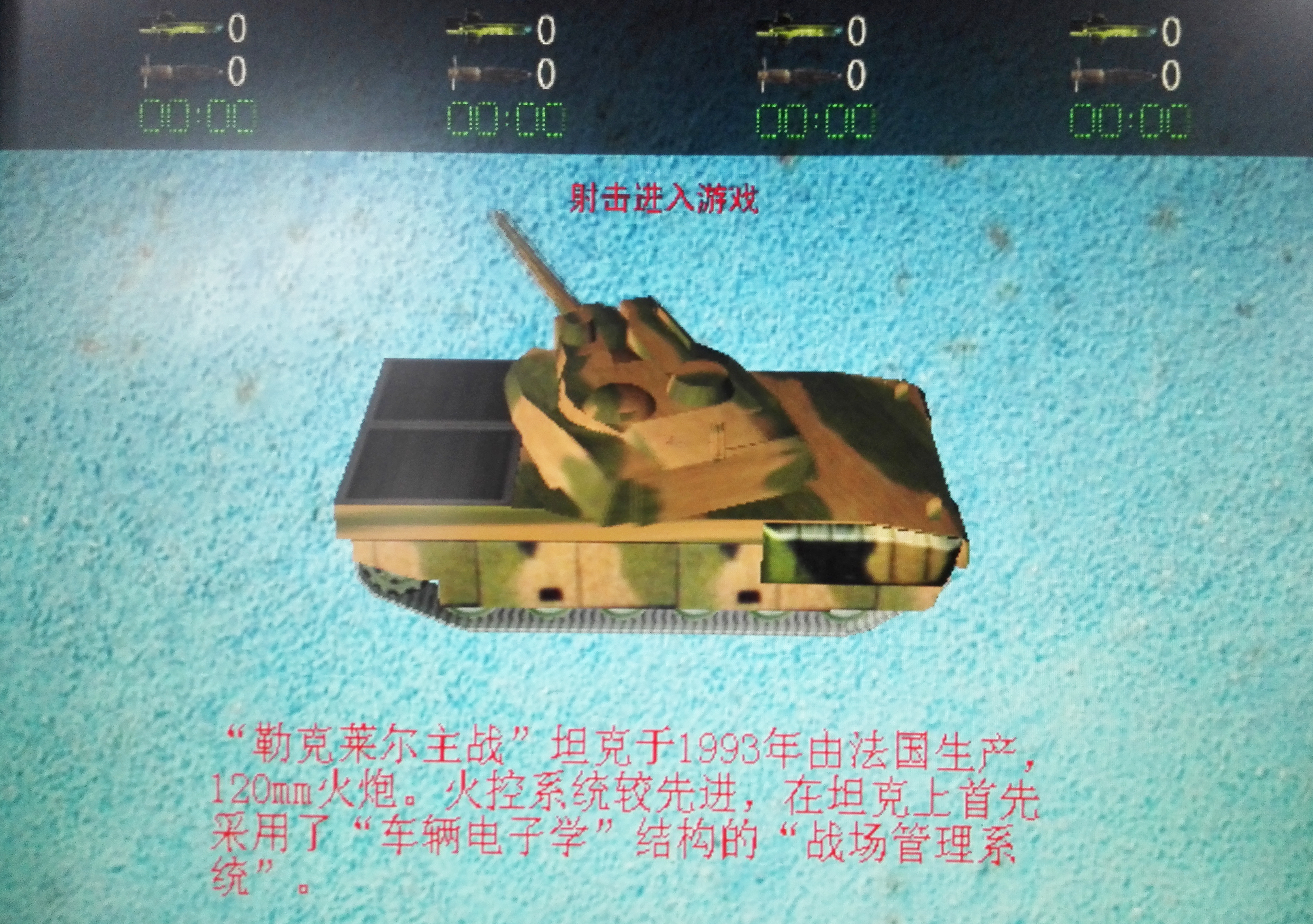
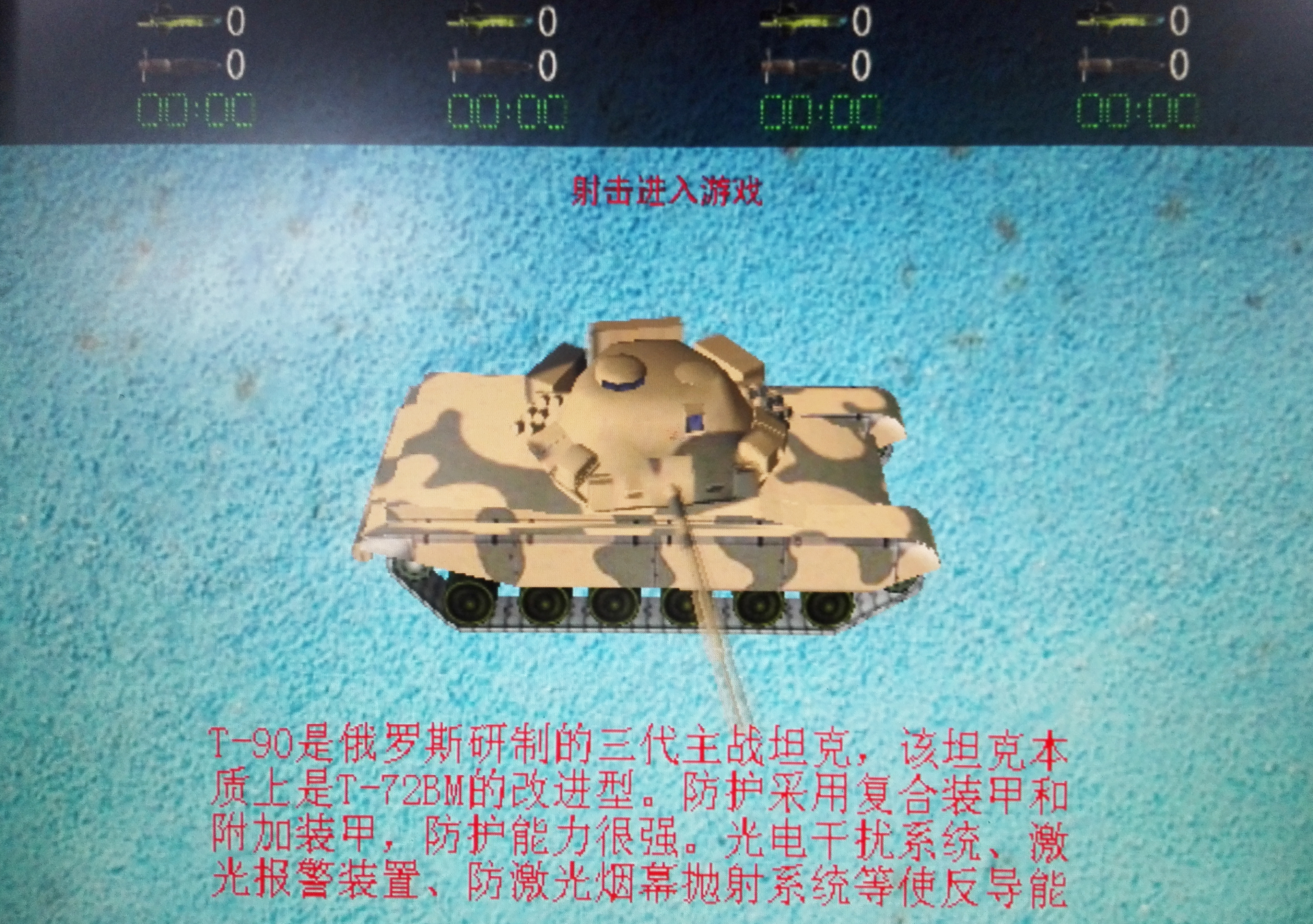
图1 反坦克武器系统初始设置


图2 虚拟仿真反坦克武器系统作战动态场景
光电搜跟单元部分采用方位电机、方位编码器、方位陀螺、俯仰电机、俯仰编码器、俯仰陀螺、CCD图像传感器、光电伺服控制板、光电伺服驱动板等实现二轴直流伺服控制、图像采集等功能,模拟搜索跟踪目标。
武器随动单元部分采用方位电机、方位编码器、方位测速机、俯仰电机、俯仰编码器、俯仰测速机、激光发射器、随动伺服控制板、随动伺服驱动板等实现二轴直流伺服控制、激光指向等功能,并可实现与光电搜跟单元随动如图3所示

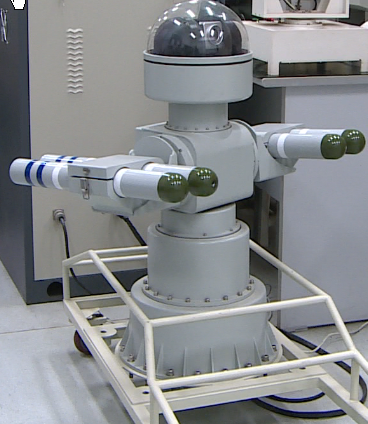
图3 光电搜跟及武器随动单元
操控平台通过CCD图像采集、信号分析等实现人机交互与显控,模拟操控手柄采用二维压敏传感实现手动跟踪与瞄准,武器击发开关通过信号发射模块输出击发信号,模拟计算机接收后输出发射效果,如图4、5所示。


图4 操控平台


图5 操控手柄
评估平台通过摄像机采集目标信号、激光指向信号等,经模拟计算机分析处理,输出打击效果,并对打击效果进行评估。
本综合实验共包括以下8个实验单元:
(1)增量式编码器结构原理、信号处理及应用
(2)直流力矩电机结构、原理及应用
(3)直流电机PWM驱动器电路原理及信号测试
(4)反坦克武器系统光电组件虚拟装配
(5)反坦克武器系统整机组件式虚拟装配
(6)光电系统PID伺服控制参数及控制效果模拟
(7)轴的结构设计要求,轴上零件的轴向定位和固定
(8)