轮式机器人构形设计与性能分析(综合型)
作者: 来源: 发布日期:2021-09-29
实验简介:虚拟样机技术是进行产品数字化设计的核心技术,是机械工程、控制工程、航天工程等领域工程技术人才必须掌握的技术之一,机器人移动机构是典型的复杂机械系统,具有机构运动复杂、系统集成度高、工作环境多变等特点,有很高的运动学和动力学特性要求。本实验以轮式空间机器人移动机构为对象,综合利用RecurDyn虚拟样机系列软件、轮式机器人移动机构创新设计组合、运动学和力学传感器进行机器人机构构形设计与性能分析。
实验功能:
(1)基于模块化设计思想,采用轮式机器人模块组合的方法,基于三维设计软件SolidWorks建立轮式机器人整机设计模型,如图1所示;
(2)基于虚拟样机设计与分析软件RecurDyn和控制系统仿真软件Matlab/SimuLink建立轮式机器人虚拟样机(含机械系统和控制系统),建立轮式机器人移动性能的数学评价模型,如图2所示;
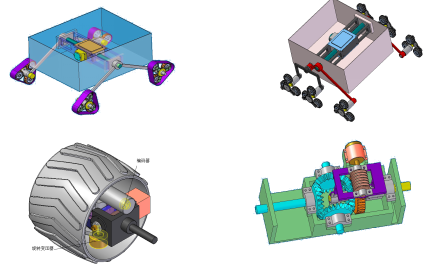
图1 机器人构型设计
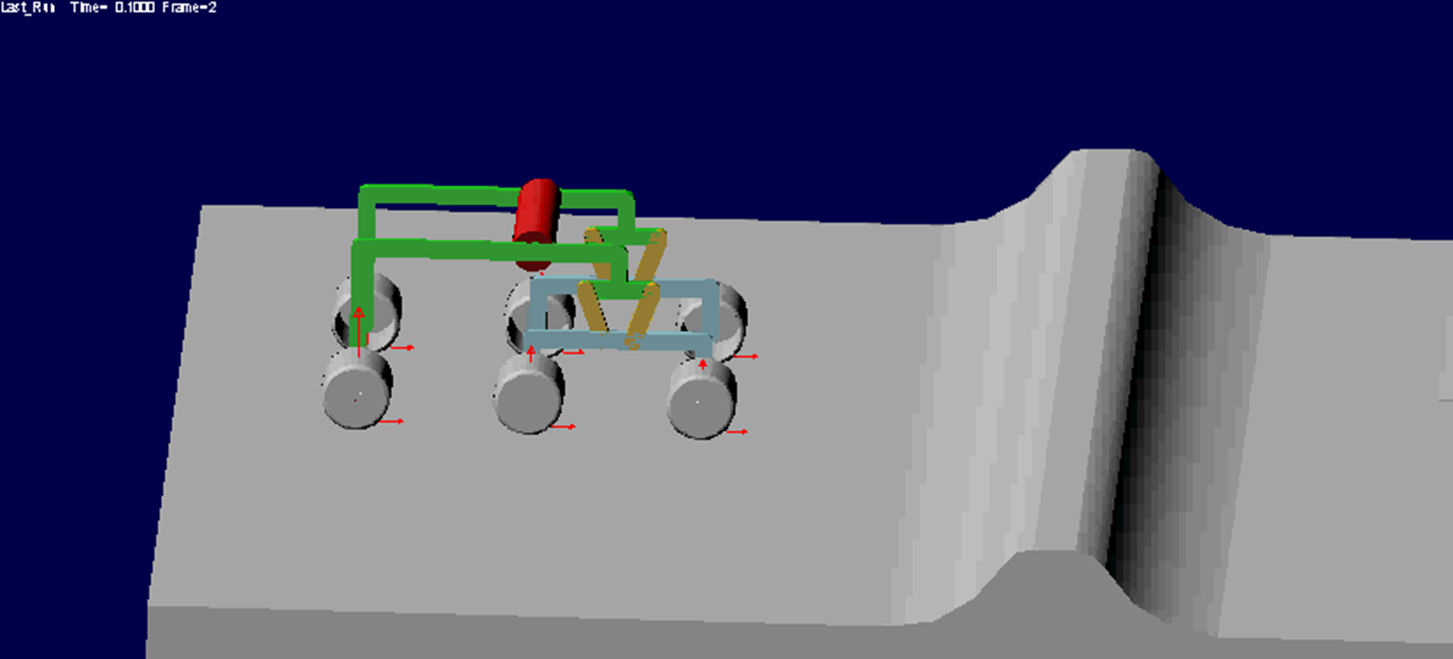
图2 机器人虚拟样机建模
(3)基于所建立的虚拟样机和评价模型,进行机器人机械系统和控制系统的联合仿真,对机器人的运动学和动力学特性进行分析和虚拟试验,研究地面与轮系的相互作用力及其对机器人移动性能影响,研究机器人在复杂地形环境下的移动性能。
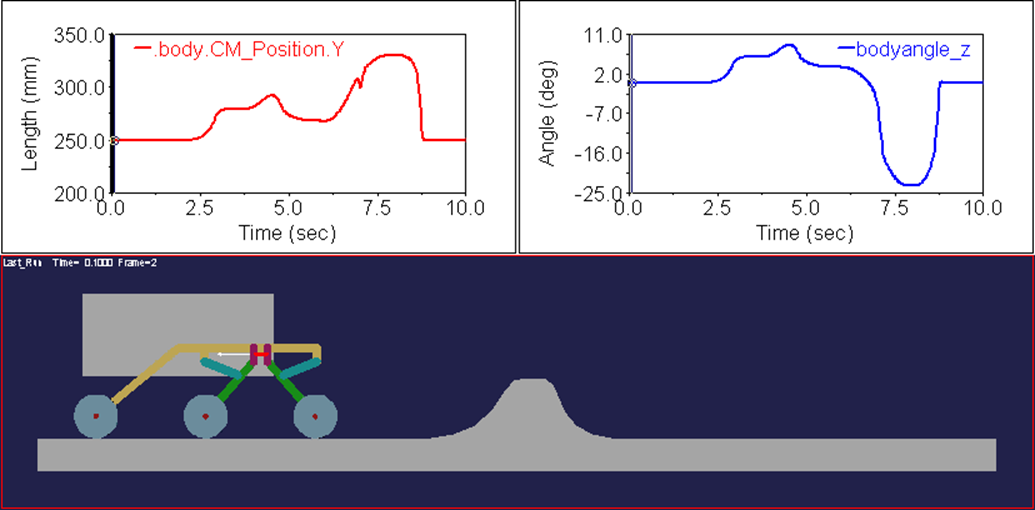
图3 机器人虚拟实验
(4)制定试验方案,对机器人移动机构整机运动学、动力学特性进行测试和分析技术,提交轮式空间机器人移动机构虚拟样机模型和实验分析报告。

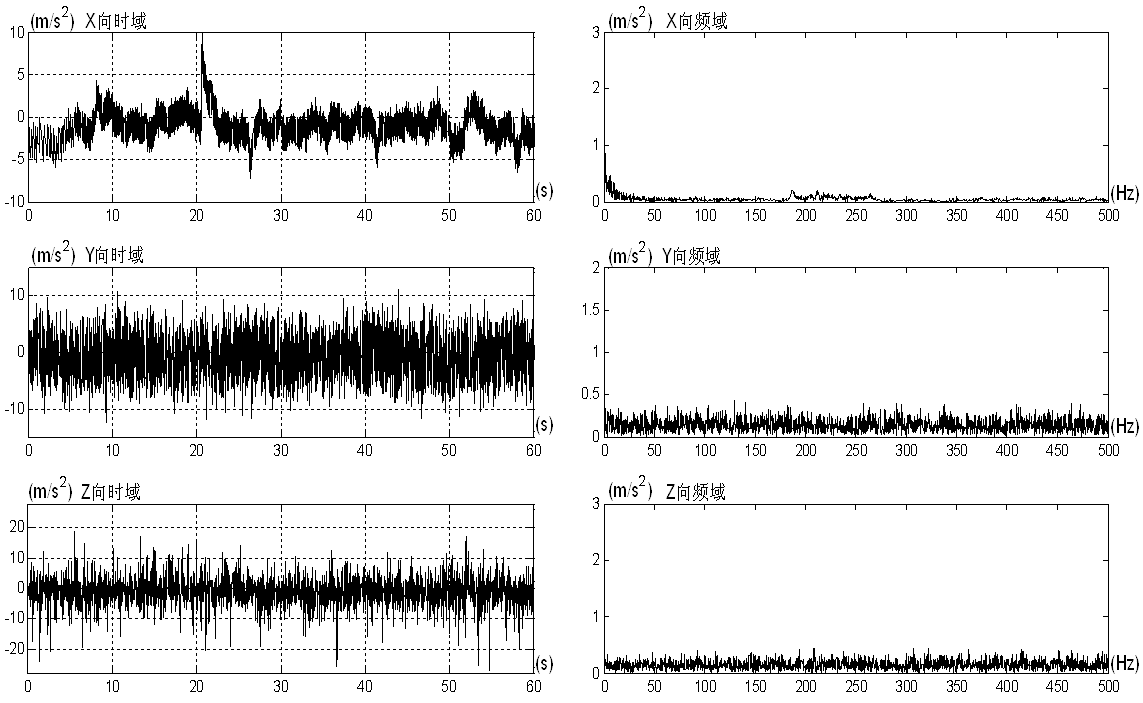
图4 测试与分析
实验效果:
(1)培养机械系统创新设计、虚拟样机建模和分析能力;
(2)熟悉常见机械量的测量方法和技术,熟练掌握测试设备的使用;
(3)掌握机器人移动机构整机运动学、动力学特性的测试和分析方法;
(4)掌握复杂机器人移动机构的运动控制方法。