雷达伺服机构随动控制虚拟仿真实验(创新型)
作者: 来源: 发布日期:2021-09-29
实验简介:随动控制是机电系统运动控制的重要类型之一,其随动控制的精度对系统的性能起到重要作用。由于实际系统受诸多方面的限制,不便于直接应用于实际教学,学员很难有机会去面对真实的雷达学习其中的机电控制原理。雷达伺服机构随动控制虚拟仿真实验将雷达防空系统的主要伺服控制原理展示给学员,便于学员理解和掌握。
实验功能:系统可通过手柄和控制按钮对模拟雷达进行控制;通过控制按钮对模拟装置进行随动控制;在屏幕上通过激光点显示随动控制效果。
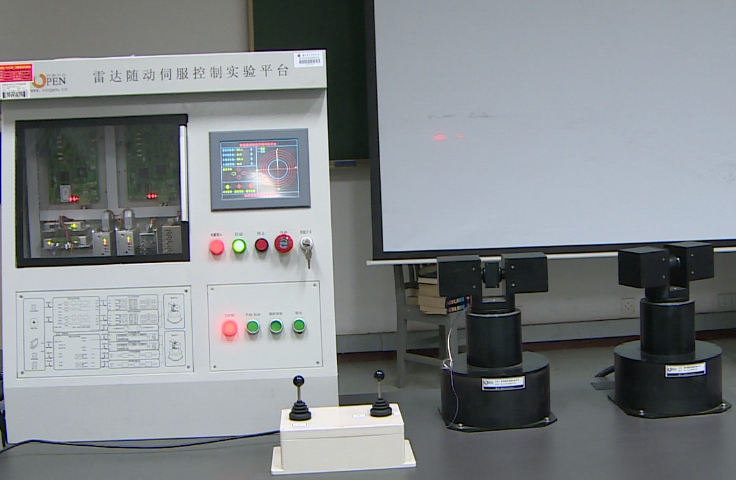
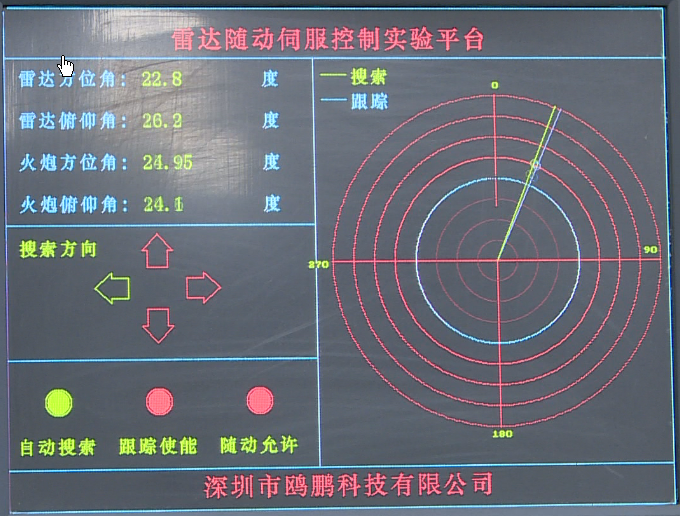
图1 雷达伺服机构随动控制半实物仿真实验
实验效果:雷达伺服机构随动控制虚拟仿真实验很好的展示了雷达自动/手动搜索等多种工作模式,模拟装置的随动控制,整个系统高度开放,对于学员建立随动控制的概念、理解其精度决定因素有很好的促进作用。